 3点步进控制(Three Point Stepping Control) 术语种类:VMD控制器说明
3点步进控制(Three Point Stepping Control) 术语种类:VMD控制器说明
CPU 术语种类:基本定义
CPU 是central processing unit的缩写,指电路板上的微处理器,CPU控制整个仪表所有的测量、报警和控制功能。
LED 术语种类:基本定义
发光二极管的缩写(LED),这些 LED 通常用作指示灯(比如:报警指示),上下两排的 7 段数码显示也是 LED。
mADC 术语种类:基本定义
符号mADC表示直流电流的毫安数,用作直流毫安电流输入范围和线性直流毫安电流输出的参考单位值,典型值为0mA到20mA或者 4mA到20mA。
PID控制(PID Control) 术语种类:控制器说明
比例积分与微分控制可以保持工艺参数的控制精度和稳定性(常用于温度控制),它通过连续地调整输出变量,将过程变量稳定在设定点处,避免了On-Off开关控制模式下的震荡问题。
同时参见控制动作,控制类型,自动重置,控制器,手动模式,On-Off开关控制,PI控制,主比例带,过程变量,速率,辅比例带,设定点,调整和电动阀门驱动控制。
PI控制 (PI Control) 术语种类:控制器说明
比例与积分 (PI) 控制用来控制调整阀,该功能与 PID控制功能类似,但没有可能会引起阀门动作过的微分(rate) 作用。
同时参见调整阀,PID控制,微分,调整和电动阀门驱动控制。
PLC 术语种类:基本定义
可编程逻辑控制器,这是一种基于微处理器的控制模块,用于设备控制,这种控制器特别适用于顺序控制的应用场合,一般使用“梯形图”来编程,有些 PLC具有基本的 PID控制功能,但比较昂贵,并且控制效果较差。
同时参见PID。
VMD 术语种类:VMD控制器参数
报警动作(Alarm Action) 术语种类:基本定义
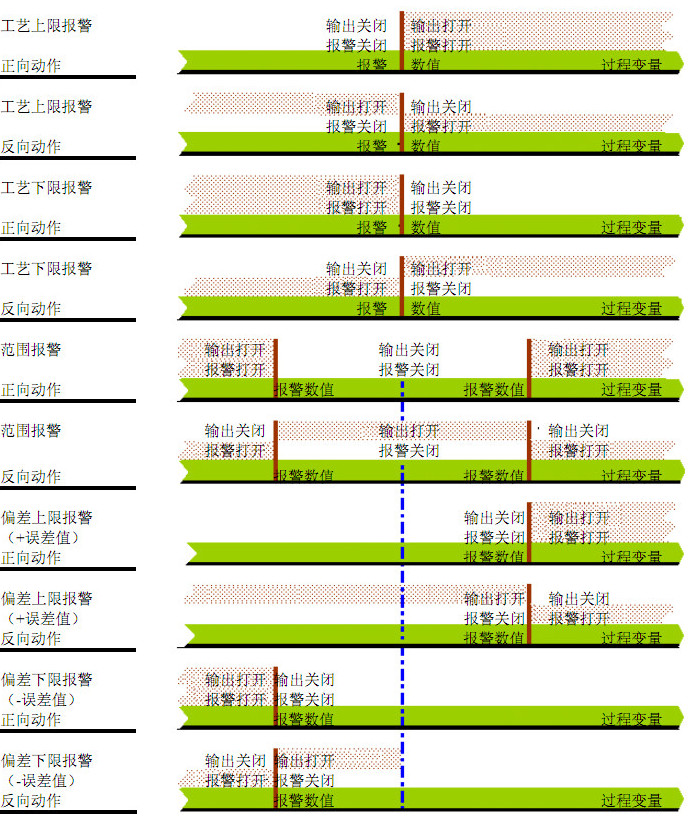
下面表格中表示了不同种类的报警类型,同时给出了各种输出类型的动作。
同时参见报警滞后,报警终止,报警,偏差报警,自锁继电器,逻辑报警组合,回路报警,工艺上限报警和工艺下限报警。
报警逻辑组合(Logical Combination) 术语种类:基本定义
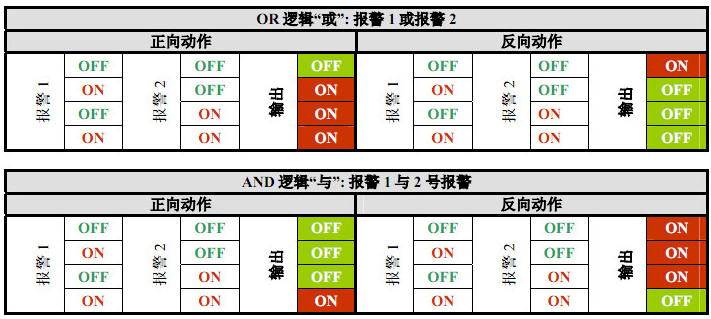
2个报警可以通过逻辑上的与/或形成复合报警,此复合报警可以分配到任何一个适当的输出上,正反作用可调。
同时参见报警动作。
报警信号器(Annunciator) 术语种类:限值控制器说明
这是连接到限值控制器主限值输出的一种特殊类型的报警输出,当越限条件出现时,会触发报警信号器输出,报警信号器触发后会一直保持激活状态直到收到复位指令或者越限条件消失,它与普通的限值输出不同,即使超越条件仍然存在,报警信号器也同样可以复位。
同时参见越限条件,自锁继电器,限值控制器,限值滞后和限值设定点
报警信号器(Annunciator) 术语种类:限值控制器说明
这是连接到限值控制器主限值输出的一种特殊类型的报警输出,当越限条件出现时,会触发报警信号器输出,报警信号器触发后会一直保持激活状态直到收到复位指令或者越限条件消失,它与普通的限值输出不同,即使超越条件仍然存在,报警信号器也同样可以复位。
同时参见越限条件,自锁继电器,限值控制器,限值滞后和限值设定点。
报警信号器(Annunciator) 术语种类:限值控制器说明
这是连接到限值控制器主限值输出的一种特殊类型的报警输出,当越限条件出现时,会触发报警信号器输出,报警信号器触发后会一直保持激活状态直到收到复位指令或者越限条件消失,它与普通的限值输出不同,即使超越条件仍然存在,报警信号器也同样可以复位。
同时参见越限条件,自锁继电器,限值控制器,限值滞后和限值设定点。
报警抑制(Alarm Inhibit) 术语种类:基本参数
也称报警清除,在控制器上电或切换设定点时禁止报警,直到报警进入关闭状态,报警动作通常从那个点开始。
同时参见报警动作。
报警滞后(Alarm Hystersis) 术语种类:基本参数
在报警的“安全”侧,是一个可以调整的范围,在报警状态改变之前,过程变量必定要经过这个参数范围,如下图中所示,说明,上限报警的滞后范围低于上限报警值,下限报警的滞后范围高于下限报警值。
同时参见报警动作部分。

变送输出 1最大量程值 (Retransmit Output 1 Scale Maximum) 术语种类:基本参数
标定插槽 1的线性输出模块,该模块已经被设定用来转发 PV或 SP数值,变送输出最大量程值规定了过程变量或设定点值,达到该数值时传送输出值将达到最大值,比如一个 0V 到 5V 的输出值,与 5V对应的数值就是最大值,变送输出最大量程值可以在 -1999到 9999的范围内调整;小数点位置总是与过程变量输入信号相同,如果该数值设定成比变送输出 1 最小量程值还小的数,过程变量/设定点值和变送输出之间的关系则成反比。
显示代码 = , 默认值=量程范围上限值。
, 默认值=量程范围上限值。
同时参见过程变量,变送输出,变送输出 1最小量程值,量程范围上限值和设定点。
变送输出 1最小量程值 (Retransmit Output 1 Scale Minimum) 术语种类:基本参数
标定插槽 1的线性输出模块,该模块已经被设定用来转发 PV或 SP数值,变送输出最小量程值规定了过程变量或设定点值,达到该数值时传送输出值将达到最小值,比如一个 0V 到 5V 的输出值,与 0V对应的数值就是最小值,变送输出最小量程值可以在 -1999到 9999的范围内调整;小数点位置总是与过程变量输入信号相同,如果该数值设定成比变送输出 1 最大量程值还大的数,过程变量/设定点值和变送输出之间的关系则成反比。
显示代码 = , 默认值 = 量程范围下限值。
, 默认值 = 量程范围下限值。
同时参见过程变量,变送输出,变送输出 1最大量程值,量程范围下限值和设定点。
变送输出 2最大量程值 (Retransmit Output 2 Scale Maximum) 术语种类:基本参数
定义了过程变量或设定点值,达到该数值时变送输出 2 的数值将达到最大值,具体情况与变送输出 2最大量程值类似。
显示代码 = , 默认值 =量程范围上限值。
, 默认值 =量程范围上限值。
同时参见过程变量,变送输出,变送输出 2最小量程值,量程范围上限值和设定点。
变送输出 2最小量程值(Retransmit Output 2 Scale Minimum) 术语种类:基本参数
定义了过程变量或设定点值,达到该数值时传送输出 2 的数值将达到最小值,具体情况与变送输出 1最小量程值类似。
显示代码 = , 默认值 =量程范围下限值。
, 默认值 =量程范围下限值。
同时参见过程变量,变送输出,变送输出 2最大量程值,量程范围下限值和设定点。
变送输出 3最大量程值(Retransmit Output 3 Scale Maximum) 术语种类:基本参数
定义了过程变量或设定点值,达到该数值时传送输出 3 的数值将达到最大值,具体情况与变送输出 1最大量程值类似。
显示代码= , 默认值 =量程范围上限值。
, 默认值 =量程范围上限值。
同时参见过程变量,变送输出,变送输出 3最小量程值,量程范围上限值和设定点。
变送输出 3最小量程值(Retransmit Output 3 Scale Minimum) 术语种类:基本参数
定义了过程变量或设定点值,达到该数值时传送输出 3 的数值将达到最小值,具体情况与变送输出 1最小量程值类似。
显示代码= , 默认值=量程范围下限值。
, 默认值=量程范围下限值。
同时参见过程变量,变送输出,变送输出 3最大量程值,量程范围下限值和设定点。
变送输出( Retransmit Output) 术语种类:基本定义
一个线性 DC 电压或者 mA 输出信号,与过程变量或设定点成比例,主要用于从控制器或外部设备,例如数据记录仪或 PLC装置,该输出可以标定为输入信号或设定点范围的任何部分。
同时参见输入量程,主与从站,过程变量和设定点。
持续时间(Elaspsed Time) 术语种类:数显表说明
从该数值最后一次重置后,报警1在数显表上触发后的总的积累时间,该时间长度不包括报警条件消失后的时间,该持续时间参数不受报警 2和报警 3影响。
同时参见报警动作,超越时间和数显表。
串级控制(Cascade Controll) 术语种类:控制器说明
对于存在两个或多个容器缓冲的控制对象(举例:通过夹套间接加热),使用单个仪表来控制就显得比较困难,经常出现超调和滞后的问题,这时最好的解决方案就是使用串级控制,将2个或多个控制器串联起来,各自监控不同的过程变量,形成一个整体。产品的设定点温度被设置在主控制器上,将这个设定温度与产品的实际温度对照,形成主控制器的PID输出(mA或VDC)作为从站的远程设定点使用。这个远程设定点(RSP,外给定),可以根据需要任意标定。理想状态下,从控回路的响应时间应至少比主控回路快5倍。
此例中,从控RSP的最大输入代表400℃,以限制夹套的温度,启动时,主控制器将产品温度(=环境温度)与它的设定点(300℃)进行对比,由于偏差很大,主控制器的输出达到最大,这样就在从控制器上设置了一个 400℃的远程设定点,从控制器将这个温度值与夹套温度(环境温度)进行对比,由于偏差很大,加热元件以最大加热功率工作。
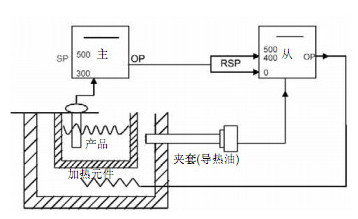
从控制器的输出会随着夹套温度的上升而逐步下降。与此同时,产品温度也会随着夹套温度的上升而逐步上升(升温速度取决于夹套和产品之间的传输滞后),这样又会引起主控制器的输出下降,降低从控制器“夹套温度”的远程设定点,从而有效地降低了加热器的输出功率,这个过程不断进行直到整个系统达到平衡为止。
整定时,首先将主控制器设置为手动,只用比例控制功能调整从控制器(一般不需要I和D),然后将主控制器切换回自动模式,再调整主控制器。这样调整的结果就是,即实现了快速、平滑的控制过程,又能使超调达到最小具有适应负载变化的能力,而夹套温度的变化如终保持在可接受的范围之内。
同时参见手动模式,主机和从站,PID,远程设定点,远程设定点下限值,远程设定点上限值,设定点,设定点选择和整定功能。
串行通信选项(Serial Communications Option) 术语种类:基本定义
该功能可以让其它装置,比如 PC、PLC 或主控制器等,通过 RS 485 串行接口去读取或修改仪表参数,详细情况可以在本手册的串行通信部分找到。
同时参见控制器,数显表,主/从机制,限值控制器和PLC。
电磁阀(Solenoid Valve) 术语种类:基本定义
这是一个用于控制气体或液体流动的机电装置,一般只有两种状态,开启或关闭,平时通过一个弹簧使阀门处于关闭的状态,当线圈通电时,电磁阀克服弹簧的弹力将阀门打开。一般来说,用来控制电磁阀的信号,是由配有时间比例输出功能的标准过程控制器发出的。
电磁阀经常用于大/小火气体燃烧器。旁路阀会持续供应一些燃气,但这些燃气的量不能满足加热工艺所需的额定热量(小火状态),在工艺过程需要增加热量时(大火状态),控制器就会输出一个打开电磁阀的信号。
同时参见调节阀和时间比例控制功能
电动阀门驱动控制(Valve Motor Drive Control) 术语种类:VMD控制器说明
电动阀门驱动控制器是用来控制调整阀的,控制时需要使用专用的“开环”电动阀门驱动(VMD)PI 控制算法,当过程值比所需的参数设定点值高或低的时候,就可以提供输出信号将阀门进一步打开,或进一步关闭,到达设定点时,除非是负载条件发生了变化,一般就不需要输出信号来保持控制状态了,这就是大家知道的 3 点步进式控制。如果安装了辅助输入选项模块,并且作了相应的设置,就可以显示阀门位置或流量。
同时参见辅助输入,调整阀,开环 VMD,PI控制,PID,设定点和阀门位置指示。
电动控制阀(Modulating Vave) 术语种类:VMD控制器说明
一种通过电动机驱动,阀门开度可以固定在全开与全关之间任意位置的阀门。
其典型应用就是燃气加热工业炉的温度控制,通常需要与 VMD 阀门控制器配合使用,将燃气的阀门控制在所需的开度。
有些控制阀的电动机需要线性(mA 或者 VDC)信号来对阀门进行定位,此时需要使用标准的过程控制器(使用 PI控制)来代替 VMD控制器。
同时参见电动机行程时间,PI控制和阀门电机驱动控制。
电机行程时间(Motor Travel Time) 术语种类:VMD控制器参数
电机行程时间是阀门开度从一端运行到另一端所需的时间,阀门电动驱动控制算法使用此参数来计算开阀或关阀时通电时间的长短,实现对过程参数的控制。
此项设置必须准确,否则会影响控制效果。行程时间在阀门的说明书中应有详细说明,也可以向供应商或制造商咨询索取。如果无法从官方途迳得到这些信息,请自行检测阀门从全开到全关所需的时间。(将控制器设置为手动模式,调整其输出)。
显示代码= , 默认设置=1.00。
, 默认设置=1.00。
同时参见手动模式启用,最小电动机通电时间和阀门电机驱动控制。
调整(Tuning) 术语种类:控制器说明
PID 控制器必须调整到与工艺相适应,使它们能够达到最优的控制水平,在调整过程中要进行调整,可以手动,也可以使用控制器的自动调整功能;如果控制器配置成 On-Off开关控制模式,就不需要使用调整功能了。
同时参见自动重置,自动自整定,On-Off开关控制,PID,自整定,主比例带,速率,自调整和辅比例带。
多点标定功能启用(Multi-Point Scaling Enable) 术语种类:数显表参数
在配置模式下,设定 可以启用数显表的多点式标定功能,最多可以规定 9 个断点,对输入信号进行线性处理,但这只适用于 mA,mV 或 V 输入型信号,在每一个断点处,先输入一个标准值,然后输入断点处的显示值。
可以启用数显表的多点式标定功能,最多可以规定 9 个断点,对输入信号进行线性处理,但这只适用于 mA,mV 或 V 输入型信号,在每一个断点处,先输入一个标准值,然后输入断点处的显示值。
显示代码= , 默认设置=
, 默认设置= 。
。
同时参见数显表,多点标定设置和过程变量。
多点标定设置(Multi-Point Scaling Setup) 术语种类:数显表参数
在每一个断点处,输入的标准值( )都是输入量程的百分比,后面紧跟着对应该输入值要显示的数值 (
)都是输入量程的百分比,后面紧跟着对应该输入值要显示的数值 ( ),并带有数值单位。每一个断点的标准值都必须比前一个数值高,而显示值可以高,也可以低,这个步骤要反复进行,直到 9个断点的设置都完成为止,但任何一个标准值如果设置成 100%,它就会自动变成系列数值中的最后一个。
),并带有数值单位。每一个断点的标准值都必须比前一个数值高,而显示值可以高,也可以低,这个步骤要反复进行,直到 9个断点的设置都完成为止,但任何一个标准值如果设置成 100%,它就会自动变成系列数值中的最后一个。

同时参见数显表,多点标定功能启用和过程变量。
阀门关闭限制(Valve Close Limit) 术语种类:VMD控制器参数
需要在电动阀门控制器上使用阀门位置显示功能时,此参数就在阀门的上限位置提供一个“限位开关”, 这样控制器就不会让阀门越位,该限制位置可以设定在 0(全闭)和阀门开启限制值–1之间,表示成阀门“全开”位置的百分数。
使用此参数之前必须使用” 阀门开启位置设定”和” 阀门关闭位置设定“参数正确的标定辅助输入。
显示代码 = , 默认设置 =0 。
, 默认设置 =0 。
同时参见辅助输入,阀门关闭位置设定,阀门开启位置设定,阀门开启限制,电动阀门控制和阀门位置指示。
阀门开启限制(Valve Open Limit) 术语种类:VMD控制器参数
需要在电动阀门控制器上使用阀门位置指示功能时,此参数就在阀门的上限位置提供一个“夹板”,这样控制器就不会让阀门越位,该限制位置可以设定在 100(全开)和阀门关闭限制值+1 之间,表示成阀门“全开”位置的百分数。
使用此参数之前必须使用” 阀门开启位置设定”和” 阀门关闭位置设定“参数正确的标定辅助输入。
显示代码 = , 默认设置 =
, 默认设置 = ���。
���。
同时参见辅助输入,阀门关闭位置设定,阀门开启位置设定,阀门关闭限制,电动阀门控制和阀门位置指示。
阀门位置或流量指示 (Valve Position or Flow Indication) 术语种类:VMD控制器说明
电动阀门驱动控制器不需要位置反馈信号,PID 算法可以正确的控制工艺参数。但是如果有阀位或流量信号的话,它们可以以百分比的方式显示在仪表上(0 到 100),表示相应的阀门开启程度或流量大小,在操作模式下,显示策略设置成 7时,阀门位置显示位于数显表下方,代替了设定点显示。
阀门位置反馈信号通常是使用连接在阀门上的电位器来提供,电位器可以直接连接到全功能辅助输入端口(只能是选项插槽 B)。
标准的流量仪表具有 0mA-20mA/4mA-20mA或 0V-5V/0V-10V的线性信号,可以与 1/16 Din标准 VMD控制器的全功能辅助输入或基本辅助输入功能(只有选项插槽 A)一起使用。
即使按照这种方法提供了位置反馈功能,开环 VMD 控制计算功能在对阀门定位时也不用这个信号,这是为了避免错误的反馈信号带来的问题。
同时参见辅助输入,显示策略,开环 VMD,PID,阀门关闭位置设定,阀门开启位置设定,设定点和电动阀门控制。
范围报警 1数值(Band Alarm1 Value) 术语种类:基本参数
仅在报警1用作范围报警时才可用,此参数规定了一个以当前设定点为中心,过程值变化的范围,如果过程变量数值在此范围之外,就触发报警,本参数可以从1到满量程的范围内调整。显示代码= .默认值 =5。
.默认值 =5。
同时参见报警动作,范围报警2数值和输入量程。
范围报警 2数值(Band Alarm2 Value) 术语种类:基本参数
本参数与范围报警1数值类似,仅在报警 1用作范围报警时才可用。
显示代码= ,默认值 = 5。
,默认值 = 5。
同时参见报警动作,范围报警1数值和输入量程。
辅控比例带(Secondary Proportional Band) 术语种类:控制器调整参数
辅控输出与过程变量成比例的那部分输入区域占输入量程的百分比,该比例带在 0.0%(ON/OFF)到999.9%的范围内可调。对辅控输出的控制操作总是与主控输出相反。
辅比例带只有在使用双控制输出模式时才有用。
显示数值 = , 默认值 = 5.0%。
, 默认值 = 5.0%。
同时参见控制动作,控制类型,On-Off开关控制,输入量程,重叠/死区,PID,主控比例带和调整。
辅助输入(Auxilliary Input) 术语种类:基本定义
这是一个可选的辅助线性输入模块,通常用作一个远程设定点输入或阀门位置显示。信号可以是mA, mV, VDC或电位器。 同时参见远程设定点和阀门位置指示。
固态继电器(SSR) 术语种类:基本定义
这是一种用两个硅可控整流元件制作而成的外部装置,可以在大多数使用交流电源的应用条件下,用来代替机械式继电器,作为固态装置,SSR 在开关电流过程中不会发生触点老化的问题,而且还可以实现更快的切换循环时间,因而可以实现更好的控制效果,仪表中的 SSR 驱动器输出是一个 10VDC的时间比例脉冲输出(脉冲宽度调制),它可以在脉冲运行时将所需的电流加载到负载上。
同时参见循环时间,时间比例控制功能和三端双向可控硅开关元件。
归零 (Tare) 术语种类:数显表参数
如果启用了数显表的归零功能,操作人员就可以将当前的过程变量输入值设置成显示为 0,该功能可以很方便地用来清除任何输入信号的偏移,比如某个变送器的输出没有给出一个真 0 值,归零功能也可以用在实际应用过程中,来显示产品的重量,在开始计量之前去除容器的重量,启用归零功能后,仪表就会 自动将 PV 偏移值设定成 与当前量 程值相等 但相反的 数量值 。
显示代码 = , 默认设置 =
, 默认设置 = (禁用)。
(禁用)。
同时参见数显表, 过程变量, 和偏移。
过程变量 (PV) 术语种类:基本定义
过程变量是接在仪表主输入上需要测量的变量,过程变量可以是能够转换成适合输入的电信号的任何参数,常见过程变量有热电偶信号、PT100 热电阻信号,或者由变送器转换为标准信号(例如 4 mA-20mA)的压力、液位、流量信号,线性信号可以用量程范围上限值和量程范围下限值参数转换成工程单位类型的数据。
同时参见输入范围,偏置,量程范围上限值和量程范围下限值。
过程变量偏置(Process Variable Offset) 术语种类:基本参数
过程上限报警 1的数值 Process High Alarm 1 Value 术语种类:基本参数
只有将报警 1 选择为过程上限报警时,此参数才有效,它定义了报警 1 触发时的过程变量值,该报警数值可以在量程范围上限值和量程范围下限值之间进行调整。
显示代码= , 默认值=量程范围上限值。
, 默认值=量程范围上限值。
同时参见报警动作,过程上限报警 2的数值,过程变量,量程范围上限值和量程范围下限值。
过程上限报警 2的数值(Process High Alarm 2 Value) 术语种类:基本参数
只有将报警 2选择为过程上限报警时,此参数才有效,该数值与过程上限报警 1的数值类似。
显示代码= ��, 默认值 =量程范围上限值。
��, 默认值 =量程范围上限值。
同时参见报警动作,过程上限报警 1的数值,过程变量,量程范围上限值和量程范围下限值。
过程下限报警 1的数值 (Process Low Alarm 1 Value) 术语种类:基本参数
只有将报警 1 选择为过程下限报警时,此参数才有效,它定义了报警 1 触发时的过程变量值,该报警值可以在量程范围上限值和量程范围下限值之间进行调整。
显示代码= , 默认值=量程范围下限值。
, 默认值=量程范围下限值。
同时参见报警动作,过程下限报警 2的数值,过程变量,量程范围上限值和量程范围下限值。
过程下限报警 2的数值 (Process Low Alarm 2 Value) 术语种类:基本参数
只有将报警 2选择为过程下限报警时,此参数才有效,该值与过程下限报警 1的数值类似。
显示代码= , 默认值 =标定围下限值。
, 默认值 =标定围下限值。
同时参见报警动作,过程下限报警 1的数值,过程变量,量程范围上限值和量程范围下限值。
回路报警启用(Loop Alarm Enable) 术语种类:控制器参数
该功能用来启用或禁用回路报警,回路报警是一种用来探测控制反馈回路中的故障的专用报警,通过连续的监测过程变量对控制输出的响应来工作,回路报警可以连接到任何合适的输出;该功能启用后,会反复检测控制输出的状态,查看输出是否处于最大限值或最小限值,如果控制输出处于最大限值或最小限值,仪表就启动一个内部计时器,随后,如果过程变量在经过预设的时间“T”之后的变化量没有达到预设的数值“V”,则回路报警功能就触发,紧接着,回路报警模式就反复检查过程变量和控制输出数据状态,当过程变量开始以正确的方式修改数据时,或者当输出数据不再高于限定值时,回路系统就取消报警状态。
对于 PID控制模式,回路报警时间 'T'总是自动重置(积分)的2倍,对于On-Off开关控制模式,则使用用户定义的回路报警时间数值。
‘V'的数值取决于输入类型,对于温度输入,V =2°C 或 3°F,对于线性输入,V =10个最小显示单位。
对于单输出(仅主控输出)的控制器,控制输出下限值是0%,而对于双输出(主控和辅控)的控制器,控制输出下限值是-100%。
回路报警功能的正确运行取决于 PID 参数有关,在手动控制模式下,以及自整定期间,回路报警功能自动取消;退出手动模式后,或是自整定执行完毕后,回路报警功能会自动重新启用。
显示代码= ,默认值=
,默认值= ,
,
同时参见回路报警时间,手动模式,On-Off开关控制,自整定和过程变量。
回路报警时间(Loop Alarm Time) 术语种类:控制器参数
在仪表处于 On-Off 开关控制模式下,并且启动了回路报警功能时,这个参数才会出现。此参数定义了一个时间长度,控制回路在最大或最小输出下如果在这段时间之内一直没有响应,才会触发回路报警,该时间可以在 1秒到 99分 59秒的范围内调整。如果没有选择 On-Off开关控制,或者禁用了回路报警功能,这个参数不会显示。
显示代码= , 默认设置是 99:59。
, 默认设置是 99:59。
同时参见启用回路报警。
活动设定点(Active Setpoint) 术语种类:控制器说明
有些控制器可能有 1 个以上的设定点(比如设定点 1 和设定点 2,或本地设定点和远程设定点),但任何时候都只有 1个活动设定点。
同时参见实际设定点、远程设定点、设定点、设定点选择和设定点选择启用部分。
积分(Integral ) 术语种类:控制器调整参数
开关控制(On-Off Controll) 术语种类:控制器说明
在 On-Off开关控制模式下运行时,输出状态将按照过程变量是否超越设定点的情况打开或关闭,其工作模式与温度开关类似,使用 On-Off开关控制功能时,过程变量的震荡是不可避免的。
On-Off 开关控制只能和时间比例控制一起使用(继电器,可控硅或固态继电器的驱动输出等等),使用时要将相应的比例带设置到零,On-Off 开关控制可单独用于主控输出(没有辅控输出)或辅控输出(将主控输出设置为时间比例或线性电流模式)或主控输出和辅控输出。
On-Off开关控制功能在 VMD阀门电机驱动控制器上不能使用。
同时参见偏差, PID,过程变量,主比例带,辅比例带,设定点, 时间比例控制功能和电动阀门驱动控制。
开关偏 差(On-Off Differential/Hysteresis) 术语种类:控制器参数
开环 VMD(Open Loop VMD,电动阀门驱动装置) 术语种类:VMD控制器说明
“开环”PID 控制算法不需要从阀门获取位置反馈信号,即可正确的控制工艺过程。它使用过程变量与设定点值的偏差来确定阀门打开或关闭所需要的通电时间的长短(与电机的行程时间有关),来控制工艺过程。
即使提供了阀门位置显示的反馈信号,控制器在对阀门定位时也不会使用该信号,这样就避免了与反馈信号故障有关的问题。
同时参见调整阀,电机运动时间, PID,过程变量,设定点, 阀门位置显示和电动阀门驱动控制。
控制类型(Control Type) 术语种类:控制器参数
定义控制器的工作方式是单输出还是双输出。单输出时只能在一个方向上改变过程值(比如只能加热,只能冷却,只能增加湿度等等),使用双输出时,可以使PV增加或减少(比如加热/冷却控制、加湿/除湿控制等等)。
在VMD电动阀控制器上不能使用双向输出。
显示代码 s= 和
和 , 默认值=
, 默认值= 。
。
同时参见PID,主比例带,过程变量,辅比例带和电动阀门控制功能
控制器 (Controller) 术语种类:控制器说明
能够使用PID方式或On-Off(开/关)方式控制过程变量的仪表,同时配有报警输出功能,可以通过预设的PV值来触发报警,还有其它一些选项,比如PV值的变送输出(转发功能)和串行通信功能。
同时参见报警动作,数显表,限值控制器,On-Off控制器,PID,过程变量,变送输出和串行通信。
控制输出的正/反作用(Direct/Reverse Action of Control Output) 术语种类:控制器说明
对于冷却控制,正作用是标准应用,说明:如果过程值超过设定点,正作用的 On-Off控制输出,会处于 ON 状态, 正作用的线性控制输出%会增加(在比例带之内时)。对于加热控制,反作用是标准应用,说明:如果过程值低于设定点,反作用的 On-Off控制输出,会处于 ON状态。反作用的线性控制输出%会增加(在比例带之内时)。如果主控输出选择为反作用,辅控输出就是正作用,如果主控输出选择为正作用,辅控输出就是正作用。
同时参见控制类型,On-Off开关控制,PID,主比例带和辅比例带
连续控制(Current Propotion) 术语种类:控制器说明
在配置了线性电流或电压输出的控制器上,可以执行连续控制,它可以提供一个4mA到20mA,0mA-20mA,0V到5V,0V到10V或2V-10VDC的PID输出。使用连续控制时On-Off开关控制不能使用。
同时参见On-Off开关控制,PID,主比例带,速率,辅比例带和时间比例控制功能。
量程范围上限值(Scale Range Upper Limit) 术语种类:基本参数
对于线性输入,此参数用来以工程单位显示过程变量值,该数值定义了过程变量输入值达到最大值时所显示的数值,该数值在-1999 到 9999 之间可调,该数值可以设定成比量程范围下限值小的数值(但不在 100单位以内),在这种情况下,输入响应成反比关系。
对于热电偶输入和 RTD热电阻输入,此参数用来减小输入参数的有效范围,所有与量程范围有关的功能都将以修整过的输入范围为运行依据,此参数可以在规定的范围内进行调整,调整的限定范围是由配置模式下的参数� 选定的,此参数还可以在量程范围下限值 100度的范围内进行调整。
选定的,此参数还可以在量程范围下限值 100度的范围内进行调整。
显示代码 = , 默认值 =1000用于线性输入或温度输入范围最大值。
, 默认值 =1000用于线性输入或温度输入范围最大值。
同时参见输入量程,过程变量和量程范围下限值。
量程范围下限值(Scale Range Lower Limit) 术语种类:基本参数
对于线性输入,此参数用来以工程单位显示过程变量值,该数值规定了过程变量输入值达到最小值时所显示的数值,该数值在-1999 到 9999 之间可调,该数值可以设定成比量程范围上限值大的数值(但不在 100单位值以内),在这种情况下,输入响应成反比关系。
对于热电偶输入和 RTD热电阻输入,此参数用来减小输入参数的有效范围,所有与量程范围有关的功能都将以圆整过的输入范围为运行依据,此参数可以在规定的范围内进行调整,调整的限定范围是由配置模式下的参数� 选定的,此参数还可以在量程范围上限值 100度的范围内进行调整。
选定的,此参数还可以在量程范围上限值 100度的范围内进行调整。
显示代码 = , 默认值 =0用于线性输入或者温度输入范围最小值。
, 默认值 =0用于线性输入或者温度输入范围最小值。
同时参见输入范围,过程变量和量程范围上限值。
偏差报警 1的数值(Deviation Alarm 1) 术语种类:基本参数
本功能只有在选用报警1作为偏差报警时才有效,正值(高偏差)设置在当前设定点的报警点上方,负值(低偏差)设置在当前设定点的报警点下方,如果过程变量与设定点的偏差超过了这个值,就触发报警 1。
显示代码= �,默认值 = 5。
�,默认值 = 5。
同时参见报警动作和偏差报警 2的数值。
偏差报警 2的数值(Deviation Alarm 2) 术语种类:基本参数
本功能只有选用报警 2作为偏差报警时才有效,功能与偏差报警 1的数值类似。
显示代码= 。 默认值=5。
。 默认值=5。
同时参见报警动作和偏差报警 1的数值。
偏移(Offset) 术语种类:控制器参数
偏移是用来修正测量的过程变量的,可以在±输入量程的区间内进行调整,这个参数可以用来补偿显示的过程变量差错,如果该偏移值是正值,就会在过程变量读数上增加该值,如果是负值,就会在过程变量读数上减去该值,此参数起作用时,有一个校准偏移量,必须请注意地使用它,使用不当会导致显示的数值与实际的过程变量毫无关系;此参数使用时,在显示屏上没有任何显示。
显示值= , 默认值 = 0。
, 默认值 = 0。
同时参见输入量程,过程变量和归零功能
偏置(Bias, Manual Restet手动重置)术语种类:控制器调整参数
用于线性输出的手动偏置调整,以补偿工艺负荷的变化,Bias以输出的百分数来表示,可以在0%到100%的范围内进行调整 (对于单输出而言),或者在-100%到 +100%的范围内进行调整(对于双输出而方-加热/冷却控制)。如果主输出工作在ON/OFF(开/关)控制模式下,此参数就不起作用,如果工艺参数低于设定点,可以将 Bias设置的高一点以消除偏差,如果工艺参数高于设定点,可以将 Bias设置的低一点以消除偏差,较低的Bias数值还有助于工艺启动时避免参数越限。
显示代码=��� ,默认值=25%。
,默认值=25%。
同时参见ON/OFF(开/关)控制和PID。
启用设定点斜坡(Setpoint Ramping Enable) 术语种类:控制器参数
设定点斜坡的查看和调整可以在操作模式下启用或关闭,此参数不是用来关闭斜坡设定点的,它只是将其从操作模式下移走而已,用户仍然可以在设置模式下来查看和调整斜坡,如果要终止斜坡,斜率必须设定到 OFF(空白)。
显示代码 = , 默认设置 = 关闭。
, 默认设置 = 关闭。
同时参见过程变量,设定点和设定点斜坡。
启用设定点选择(Setpoint Select Enable) 术语种类:控制器参数
如果使用了远程设定点,此参数用于设定是否允许使用设定点选择操作,如果启用,在操作模式下就可以使用“设定点选择”参数,如果设定点选择再次被禁用,活动设定点将保持其当前状态。
显示代码 = , 默认设置 =
, 默认设置 = (禁用)。
(禁用)。
同时参见远程设定点和设定点。
切换偏差(Differential, On-Off Hystersis开关滞后) 术语种类:控制器参数
当控制输出设置为 On-Off开关功能时使用,此参数可以在 0.1% 到 10.0%输入量程的范围内进行调整;
其默认值是 0.5%,偏差带以设定点为中心。
通过合理地调整此参数,可以减少继电器触点的动作频率,此参数太大时会增加这个过程变量的波动幅度。
显示代码= 只用于主输出,
只用于主输出, 只用于辅输出,
只用于辅输出, 同时作用于主输出和辅输出。
同时作用于主输出和辅输出。
同时参见输入量程和On-Off开关控制功能。
三端双向可控硅开关元件(Triac) 术语种类:基本定义
一只小的内部固态装置,在工程应用中可以用来代替机电式继电器,用来开关低压交流电流,额定电流可达 1 安培,与常规继电器一样,输出也是时间比例式的,但切换循环时间要快得多,可以实现高级控制功能,作为一个固态装置,固态继电器在开关电流过程中不会发生触点老化的情况,三端双向可控硅开关元件不能用来切换直流电流。
同时参见循环时间,固态继电器(SSR)和时间比例控制功能
设定点(Setpoint) 术语种类:控制器说明
设定点上限值(Setpoint Upper Limit) 术语种类:控制器参数
操作人员对设定点进行调整的最大限定值,设置时要使设定点限值低于可能对工艺过程引起损害的数值,设定点上限值的调整范围在量程范围上限值和量程范围下限值之间,设定点上限值不能变动到设定点当前数值以下。
显示代码 = , 默认值=量程范围上限值。
, 默认值=量程范围上限值。
同时参见量程范围下限值,量程范围上限值,设定点和设定点下限值。
设定点下限值(Setpoint Lower Limit) 术语种类:控制器参数
操作人员对设定点进行调整的最小限定值,设置时要使设定点限值高于可能对工艺过程引起损害的数值,设定点下限值的调整范围在量程范围下限值和量程范围上限值之间,设定点上限值不能变动到设定点当前数值以上。
显示代码 = , 默认值 =量程范围下限值。
, 默认值 =量程范围下限值。
同时参见量程范围下限值,量程范围上限值,设定点和设定点上限值。
设定点斜坡的斜率(Setpoint Ramp Rate) 术语种类:控制器参数
调整或者切换设定点之后,当前设定点将沿着所设定的斜坡将向设定目标值靠近。在使用斜坡功能时,在仪表上电或者从手动模式切换回自动模式时,当前设定点的初始值将等于当前的过程值。当前的设定点值会以设定的速率上升或下降,直至到达设定点的目标值为止,设定点斜率功能用来保护工艺过程,防止设定点发生突然变化,这种变化会导致过程变量值迅速上升。
显示代码= , 默认设置 = OFF (空白)。
, 默认设置 = OFF (空白)。
同时参见手动模式,设定点,启用设定点斜率和设定点选择。
设定点选择(Setpoint Select) 术语种类:控制器参数
设置阀门打开位置(Set Valve Opened Position) 术语种类:VMD控制器参数
在电动阀门驱动控制器上需要使用阀门位置显示功能时,此参数定义了阀门全部打开时的输入值,这个输入值将通过辅助输入装置测量,在设定这个数值之前,必须将阀门驱动到“打开”的位置。
这个参数不能用来限定阀门的运动,用来限制阀门运动的另有独立的阀门关闭和打开限定参数。
显示代码 = ,默认设置 =辅助输入范围最大值。
,默认设置 =辅助输入范围最大值。
同时参见辅助输入,设定阀门关闭位置,阀门关闭限定值,阀门打开限定值,电动阀门控制器和阀门位置指示。
设置阀门关闭位置(Serial Communications Option) 术语种类:VMD控制器参数
在电动阀门驱动控制器上需要使用阀门位置显示功能时,此参数定义了阀门全关时的输入值,该输入值将通过辅助输入装置测量,在设定这个数值之前,必须将阀门驱动到“关闭”的位置。
这个参数不能用来限定阀门的运动位置,用来限制阀门运动位置的另有独立的阀门关闭和打开限位参数。
显示代码 = , 默认设置 =辅助输入范围最小值。
, 默认设置 =辅助输入范围最小值。
同时参见辅助输入,设定阀门打开位置,阀门关闭限定值,阀门打开限定值,电动阀门控制器和阀门位置指示。
时间比例控制功能 (Time Proportioning Control) 术语种类:控制器说明
当过程变量在比例带之内时。控制器按照预设的周期循环的切换输出的开关状态来实现时间比例控制功能。由控制算法确定开/关的时间比率,最终获得所需的输出功率以修正过程值和设定点之间的偏差,举例:循环时间是 32 秒,25%的功率输出就是输出接通 8 秒钟,然后关闭 24 秒钟。这种类型的输出可以用于驱动接触器、固态继电器。时间比例控制功能也可以用继电器、三端双向可控硅开关元件(固态继电器)或固态继电器驱动器输出,用作主控输出(加热)或辅控输出(冷却),具体应用取决于硬件配置。
同时参见电流线性控制,循环时间,PID,主比例带,过程变量,辅比例带,设定点,固态继电器和三端双向可控硅开关元件。
实际设定点(Actual Setpoint) 术语种类:控制器说明
实际设定点是设定点的当前值,如果设定点当前正在变化之中,该值可能与活动设定点的目标值不同,当前设定点会按所设置的斜坡斜率逐渐升高或降低,最终达到设定点的目标值为止。
同时参见当前设定点、设定点、设定点斜率启用、设定点选择部分。
手动模式(Manual Mode) 术语种类:控制器说明
如果在设置模式下启用了手动模式,在操作模式下按下 AM 键就可以让控制器进入或退出手动控制模式,自动模式和手动模式之间的切换为无扰切换。
对于标准的过程控制器,手动模式如下:
上排显示当前的过程值,下排显示当前的控制输出(格式-Pxxx, 其中 xxx 是输出的百分比)。
用户可以通过 UP或 DOWN键来增加或减少控制输出,对于只使用主控输出的控制器,输出调整范围为 0%到 100%,而对于同时使用主控输出和辅控输出的控制器,输出调整范围为 100%到 -100% (说明:全功率加热到全功率冷却)。
对于带有阀门位置显示功能的 VMD控制器, 手动模式如下:
上排显示当前的过程值,下排显示当前的阀位输出(格式-Pxxx, 其中 xxx 是阀门开度,0%-100%)。
用户可以通过 UP或 DOWN键来调整阀门开度,UP键按下的时候开阀,DOWN键按下的时候关阀
对于没有阀门位置显示功能的标准 VMD控制器,手动模式如下:
上排显示当前的过程值,下排显示 MAn,
用户可以通过 UP或 DOWN键来调整阀门开度,UP键按下的时候开阀,DOWN键按下的时候关阀
手动模式使用时要请注意操作,因为此时的控制输出由操作人员直接设定,PID 算法对工艺控制过程已经没有控制作用,操作人员必须手动保持所需的工艺数值,手动输出不受所设定的输出限值的限制。
同时参见无扰切换,手动模式启用,PID和主控输出限值
手动模式启用(Manual Mode Enable) 术语种类:控制器参数
该选项决定操作人员是否可以使用手动控制功能,如果在设置模式下启用了该功能,用户可以在操作模式下通过 AM键来切换自动模式和手动模式。
请注意,如果在手动模式下修改此参数为禁用将会使控制器锁定在手动模式,这时按下“Auto/Man(自动/手动)”键也不会使控制器返回到 PID(自动)控制功能,要退出手动模式,必须临时将此参数改为启用,切换回自动模式后,就可以安全地禁用手动模式功能。
当然对某些用户来说,也可以将控制器锁定到手动模式下,将其当作手操器使用。
如果有数字输入,并且配置过这个功能,手动模式也可以通过数字输入来切换。
处于手动模式时,“MAN(手动)”LED指示灯就会不停地闪烁。
显示代码= , 默认设置=
, 默认设置=
同时参见手动模式和PID。
输入范围(Input Range) 术语种类:基本定义
这是通过 参数在配置模式下可选的所有的过程变量输入范围和类型。
参数在配置模式下可选的所有的过程变量输入范围和类型。
同时参见输入量程。
输入量程(Input Span) 术语种类:基本定义
由量程范围上限和量程范围下限决定,作为控制器运算的基本参数,例如:比例带就是以量程的%来表示和设定的。
同时参见输入范围、量程范围下限值和量程范围上限值。
输入滤波时间常数(Input filter Time Contstant) 术语种类:基本参数
此参数用来过滤叠加在过程变量上的外部干扰信号,滤波后的 PV数值用在所有依赖于 PV数值的功能中(显示控制、报警等),该时间常数可以在 0.0秒(关闭)到 100.0秒之间以0.5的步长进行调整。显示代码= , 默认值 = 2.0 秒。
, 默认值 = 2.0 秒。
同时参见过程变量。
数显表 (Indicator) 术语种类:数显表说明
这是用于显示过程变量的仪表,PV达到预设值时可提供报警输出。其继电器输出可以选择与限值控制器类似的自锁功能,但没有相应的安全认证。数显表的其它可选功能包括PV值变送输出和串行通信,但没有过程控制功能。
同时参见报警动作,控制器,持续时间,继电器的自锁,限值控制器,多点标定,过程变量,变送输出,串行通信,归零功能。
死区(/Deadband) 术语种类:控制器参数
锁定密码(Lock Code) 术语种类:基本参数
该密码功能规定了一个 4位密码,想进入配置(20),设置(10)和自动调整(0)模式修改参数时必须输入密码。
显示代码= , 默认值表示在上面的括号中。
, 默认值表示在上面的括号中。
通信写入功能生效(Commucaion Write Enable) 术语种类:基本定义
如果安装了通信模块,仪表就可以通过 RS485通信连接,此参数用于启用/禁用数值修改操作,可用设置为只读或读/写。
显示代码= , 默认设置=r_Ww (读/写)。
, 默认设置=r_Ww (读/写)。
微分功能(Deriate) 术语种类:控制器参数
微分时间 Rate (Derivative) 术语种类:控制器调整参数
微分时间在 0 秒(OFF) 到 99 分 59 秒之间可调,此参数定义了对应于过程变量不同变化速率下控制响应。此参数不应用于阀门控制,因为对阀门位置不停的进行微量调整,会导致设备过早损坏;另外如果主控输出设定在 On-Off开关控制模式下,此参数不可用。
对于电动阀门驱动控制器来说微分时间通常设为 0秒(关闭),因为此类应用通常不需要微分作用。
显示代码 = , 默认值 = 1.15。
, 默认值 = 1.15。
同时参见On-Off开关控制,PID,过程变量,调整和电动阀门驱动控制。
无抖动 VMD控制(Boundless VMD Control) 术语种类:VMD控制器说明
无扰切换(Bumpless Transfer) 术语种类:控制器说明
无扰切换可以在切换自动/手动模式时防止控制输出的突然变化,在自动模式向手动模式转换的过程中,控制输出的初始值将被设定到先前自动模式下的数值,然后操作人员按照实际需要逐步调整到所需的数值,在手动模式向自动模式转换的过程中,控制输出的初始值将被设定到先前手动模式下的数值,然后在控制算法的影响下逐步变化到实际所需数值,对无扰切换来说积分作用是必要的,如果关闭了积分,则无扰切换也不可用。
同时参见积分和手动模式
显示策略(Display Strategy) 术语种类:基本参数
在正常操作模式下,可以改变参数的显示方式,比如,一台控制器可以显示 PV+SP,PV+可调的 SP,PV+斜坡 SP,只显示 PV或只显示SP。显示策略 6以只读方式显示操作模式下的设定点,要改变设定点值必须进入设置模式(Setup)才能操作。
显示代码=
同时参见过程变量,设定点和设定点斜坡。
限值控制器(Limit Controller) 术语种类:限值控制器说明
这是一个防护装置,它可以在预先设定的越限条件下关闭工艺过程,防止对设备或产品造成损坏,限值控制器使用的是故障安全的有自锁功能的继电器输出,操作人员只有在工艺条件回复到安全状态后才能对它进行复位,这个信号可以通过仪表按键、数字输入或串行通信指令发出;限值控制器相对于正常的工艺控制器来说是独立工作的,限值控制器具有特别的安全应用认证,推荐所有在故障状态下有潜在危险的工艺过程中使用这种控制器,。
同时参见报警信号器,控制器,超越条件,超越时间,继电器的自锁,限值滞后,限值设定点I串行通信。
限值设定点(Limit Setpoint) 术语种类:限值控制器说明
用于判定仪表是否处于越限状态,当限值控制器被设为上限动作时,如果过程值高于于限值设定则仪表处于越限状态,当限值控制器被设为下限动作时,如果过程值低于限值设定点则仪表处于越限状态。
同时参见报警信号器,越限状态,限值滞后,限值控制器和设定点。
限值滞后(Limit Hystersis, 回差) 术语种类:限值控制器说明
在限值设定点“安全”侧的一个可调整的范围,只有在过程值进入安全侧并越过了这个范围之后操作人员才能对自锁的限值继电器进行复位。
安全侧:对上限值来说是限值设定点的下方,对下限值来说是限值设定点的上方。
同时参见越限状态,继电器的自锁,限值控制器和限值设定点。
循环时间(Cyle Cycle) 术语种类:控制器说明
当输出定义为时间比例输出时,控制器用于计算脉冲宽度的时间基数,举例:如果控制输出为50%,循环时间设为32秒,则输出on 16秒,输出off 16秒。
 �分别对应选项插槽 1,2 或 3,允许使用的数值范围是 0.5,1,2,4,8,16,32,64,128,256 或 512 秒,循环时间较小时控制效果会更好一些,但是会降低机电式控制装置的使用寿命(举例:如果与继电器或电磁阀配用)。
�分别对应选项插槽 1,2 或 3,允许使用的数值范围是 0.5,1,2,4,8,16,32,64,128,256 或 512 秒,循环时间较小时控制效果会更好一些,但是会降低机电式控制装置的使用寿命(举例:如果与继电器或电磁阀配用)。
显示代码 s=, 默认值=32。
同时参见PID和时间比例控制功能。
远程辅助输入范围(Remote Auxiliary Input Range) 术语种类:控制器参数
规定了辅助输入中线性输入信号的类型和范围(mADC,mVDC,VDC 或电位计),其中 mVDC 和电位
器只适用于全辅助输入模块,这种输入可以用于远程设定点或阀门位置显示。
显示代码 = , 默认值=�
, 默认值=� 用于 RSP输入和
用于 RSP输入和 阀门位置显示。
阀门位置显示。
同时参见远程设定点,设定点和阀门位置指示
远程设定点 (RSP) 术语种类:控制器说明
远程设定点使用辅助输入选项(第二个模拟输入)来调整控制器的设定点,调整时使用一个外部线性 DC电压信号或 mA 信号,有时也可使用电位器或 mV 输入信号,远程设定点与本地设定点一样受设定点上限和设定点下限限制,标准应用包括主/从机制和串级控制。
显示代码 = 。
。
同时参见辅助输入,串级控制,远程输入范围,远程设定点下限值,远程设定点上限值,设定点和设定点选择。
远程设定点偏置(Remote Setpoint Offset) 术语种类:控制器参数
用来调整远程设定点输入数值,正值被加到 RSP 上,负值则从 RSP 上扣除,该偏置设定在–1999 到9999之间可调,但限定在量程范围上限值和量程范围下限值之间。
显示值 = , 默认值 = 0。
, 默认值 = 0。
同时参见远程设定点,量程范围上限值和量程范围下限值。
远程设定点上限值( Remote Setpoint Upper Limit) 术语种类:控制器参数
定义了 RSP输入信号最大时(比如一个 4mA到 20mA RSP信号,当输入值为 20mA时)对应的远程设定点值,该值在-1999 到 9999 的范围内可调;(小数点位置与过程变量输入信号相同);但 RSP 数值总是限制在设定点上限值和设定点下限值的范围内。
显示代码= , 默认值=PV艺变量输入范围的最大值。
, 默认值=PV艺变量输入范围的最大值。
同时参见远程设定点,远程设定点输入,远程设定点下限值 ,远程设定点偏差,设定点,设定点上限值和设定点下限值。
远程设定点下限值(Remote Setpoint Lower Limit) 术语种类:控制器参数
定义了 RSP输入信号最小时(比如一个 4mA到 20mA的 RSP信号,当输入值为 4mA时)对应的远程设定点值,该值在-1999 到 9999 的范围内可调;(小数点位置与过程变量输入信号相同);但 RSP 数值总是限制在设定点上限值和设定点下限值的范围之内。
显示代码 = , 默认值 = PV过程变量输入范围的最小值。
, 默认值 = PV过程变量输入范围的最小值。
同时参见远程设定点,远程设定点输入,远程设定点上限值 ,远程设定点偏差,设定点,设定点上限值和设定点下限值。
越限时间(Exceed Time) 术语种类:限值控制器说明
从该数值最后一次重置后,限值控制器在越限状态下的总的积累时间。
同时参见持续时间,越限状态和限值控制器。
越限状态(Exceed Condition) 术语种类:限值控制器说明
当过程变量超过所设置的限值设定点时的一种状态,举例,如果 PV 值超出上限动作的的限值设定,或者低于下限动作的限值设定,这种情况出现时将导致限值控制器关闭工艺过程,并且只有在越限状态消失之后才能复位。
同时参见报警信号器,越限时间,继电器的自锁,限值控制器,限值滞后和限值设定点。
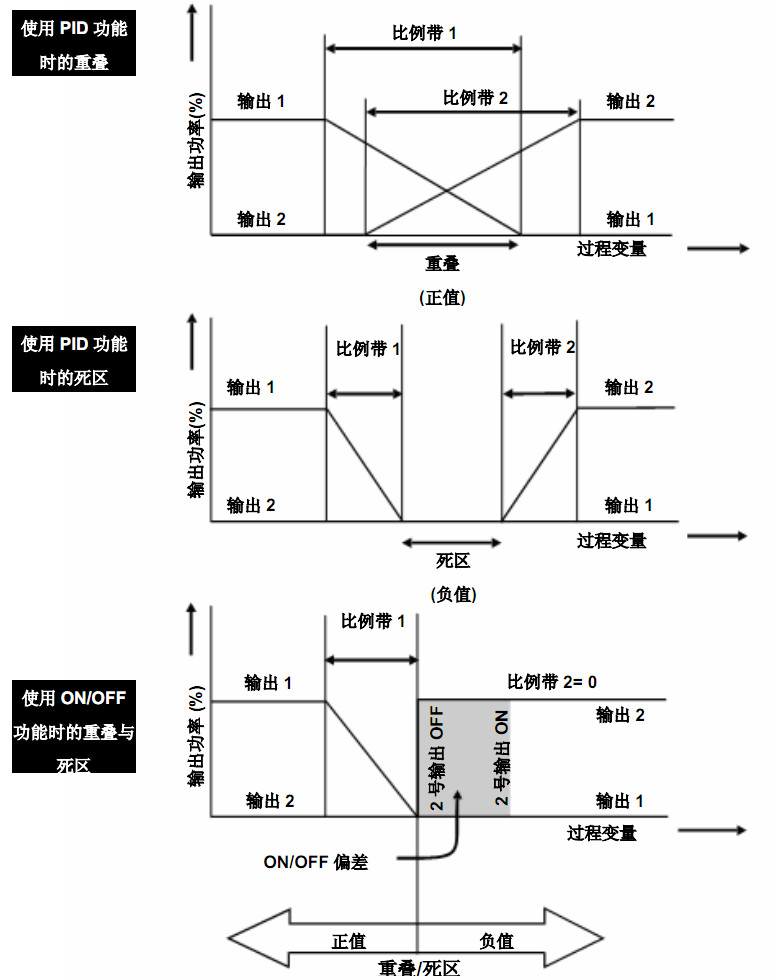
重叠/死区(Overlap/DeadBand) 术语种类:控制器参数
将主比例带和辅比例带( )的一部分定义为在此区间内两个输出都有输出(重叠),或者都没有输出(死区),此参数的调整范围为两个比例带加在一起的-20%到+20%,正值=重叠,负值=死区。
)的一部分定义为在此区间内两个输出都有输出(重叠),或者都没有输出(死区),此参数的调整范围为两个比例带加在一起的-20%到+20%,正值=重叠,负值=死区。
在主控输出设定为 On-Off开关控制模式,或者没有辅控输出时,此参数就不起作用。
如果辅控输出设定成 On-Off开关控制模式,此参数具有移动辅控输出偏差带的效果,可以形成重叠或死区,当重叠/死区带=0时,辅控输出偏差带的“OFF(关闭)”侧就刚好与主控输出= 0%的点一致。
显示代码= , 默认值=0%。
, 默认值=0%。
同时参见偏差,On-Off开关控制, 主比例带和辅比例带。
重置/复位(Reset) 术语种类:控制器调整参数
主从机制(Master/Slave) 术语种类:控制器说明
在某些特殊应用中需要由一台控制器控制另一台控制器的设定点。一般来说,主机通过线性的直流模拟量信号向从站发送设定点信号,从站必须有一个相应的远程设定点输入接口。某些折线程序控制器也可以通过通信接口来发送相应的设定点参数,此时“折线发生器”必须能够当作通信主机使用,而从站必须有与其兼容的的通信设置。
同时参见串级控制,变送输出,远程设定点,串行通信,设定点。
主控比例带(Primary Proportional Band) 术语种类:控制器调整参数
主控输出与过程变量成比例的那部分输入区域占输入量程的百分比,比例带在 0.0% (ON/OFF) 到999.9%的范围内可调。
单输出和双输出控制都适用,对于双输出控制,辅控输出使用辅比例带,控制作用可以是正作用或反作用。
显示数值= , 默认值=5.0%。
, 默认值=5.0%。
同时参见控制动作,控制类型,On-Off开关控制,输入量程,重叠/死区,PID,辅比例带和调整。
主控输出输出功率限值(Primary Output Power limit) 术语种类:控制器参数
用来限制主控输出的功率,也可用于保护控制过程,该限值在0%和100%之间可调,如果主控输出设置为On-Off开关控制模式,则此参数不适用。
显示代码is , 默认值=100%
, 默认值=100%
同时参见On-Off开关控制。
自动执行自调定(Auto Pre-Tune) 术语种类:控制器调整参数
自动重置(Automatic Reset,Integral积分)术语种类:控制器调整参数
用来自动偏置比例输出,以补偿工艺负荷的变化,该功能可以在1秒到99分钟59秒的范围内进行调整,也可以完全关闭(设定值大于99分钟59秒时就显示为� ),时间减少,积分作用增强,如果主输出设置成 On-Off(开/关)模式,则此参数不可用
),时间减少,积分作用增强,如果主输出设置成 On-Off(开/关)模式,则此参数不可用
显示代码= , 默认值=5分钟和0秒(�
, 默认值=5分钟和0秒(� )。
)。
同时参见主比例带,辅比例带,微分,PID和自整定。
自适应 (Self-Tune) 术语种类:控制器调整说明
自适应功能可以在控制器运行过程中持续地优化调整过程,它使用了一个模型识别算法,可以监测工艺过程的错误(偏差),下图中是标准的应用情况,包含了工艺启动、修改设定点和负载扰动等情况。
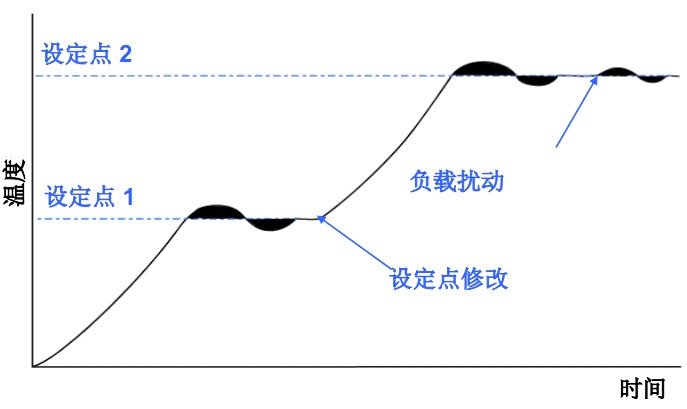
偏差信号以阴影部分表示,超调部分为了表示得更清楚而作了夸大处理,自适应计算方法在计算 PID参数之前,会监视一个完整的偏差震荡,如果震荡连续出现就重新计算 PID 参数,从而使控制器能够快速达到最优的控制参数,如果控制器被关闭,最后的 PID 数据将继续保存在控制器防丢失的存储器中而不会丢失,在下一次启动时,该组数据将作为初始数据使用,但存储的默认数据不一定总有效,比如控制器换成了新产品,或者具体使用条件发生了变化,在这些情况下,用户可以使用自整定(Pre-tune)功能来建立新的初始值。
在实际应用中,连续地使用自适应功能也是不合适的,这样会频繁地造成人为的负载扰动,比如炉门很有可能打开时间经常过长等等。
电动阀门驱动控制器中的自适应功能总是将微分设置为 0(OFF),因在这类应用条件下,通常不需要微分操作。
如果一台控制器设定成 On-Off开关控制模式,自适应功能就不能工作。
同时参见最小电机通电时间,自整定,On-Off开关控制,PID和调整。
自锁继电器(Latching Relay) 术语种类:基本定义
是一种特殊的继电器功能,一旦受到触发后,如果要解除触发动作,必须有一个复位信号;在限值控制器和数显表的报警功能中都有这种输出,为了成功复位已自锁的继电器的状态,必须首先解除引发继电器动作的报警信号或限值条件,然后再使用复位信号,这个信号可以从仪表控制盘、数字输入端口上发出,或使用串行通信指令。
同时参见报警动作,数显表,限值控制器,限值滞后,串行通信。
自整定 (Pretune) 术语种类:控制器说明
West 的自整定功能通过对启动阶段的人为干预,在到达设定点之前得到 PID的近似值,在自整定过程中,控制器的主控输出全功率开启让过程值上升到设定点与初始过程值中间大约一半的位置,到达该点后,关闭主控输出(或者辅控输出全功率开启,用于双控制输出),过程值因而产生震荡,在跳过震荡的峰值之后,自整定功能会自动计算出近似最优的 PID 参数,比例带、积分时间和微分时间,此过程如下图所示。
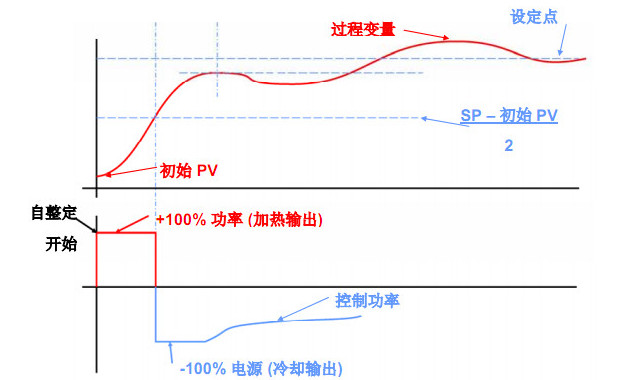
自整定完成后,控制器自动使用新的 PID参数计算控制输出。
如果是新安装的控制器,或者过程应用有所变化,进行一次自整定可以基本避免过冲。
自整定是一次性操作,完成后系统将自动脱离自整定状态,但也可以通过”自动自整定”参数将其设置为每次上电即运行。
电动阀门驱动控制器上的自整定功能总是将微分设定在 0 (关闭),因为在这类应用条件下,通常不需要微分操作。
在以下情况下,无法启动自整定:
1. 控制器的主控输出或辅控输出被设为 On-Off开关控制
2.过程与给定值的偏差小于量程的 5%
3.启用了设定点斜坡.
同时参见自动自整定,自动重置,控制类型, On-Off开关控制,输入范围,PID,主比例带,过程变量,速率,辅比例带,自适应,设定点,设定点斜率,调整和电动阀门驱动控制。
最小电动机运行时间(Minimum Motor on Time) 术语种类:VMD控制器参数
在阀门开始处于静止的条件下,该值定义了启动阀门所需的最小驱动时间,该值主要用来保证控制器的驱动作用能够克服阀门的摩擦力和惯性作用。
如果自适应是off(关闭),可通过此参数影响阀门的动作,数值大,阀门动作减少,但工艺参数有可能出现震荡,自适应可以监控阀门的动作并自动将其调整到最小值。
这个数值太大的话会削弱除自适应的效果,如果自适应运行时过程变量一直震荡,那么多半就是这个原因。
显示代码= , 默认设置=���
, 默认设置=��� 。
。
同时参见电动机运行时间,自适应和电动阀门驱动控制器。